
目录
快速导航-

专家视点 | 遥感大数据的地理环境构建及目标保障技术综述
专家视点 | 遥感大数据的地理环境构建及目标保障技术综述
-
信号与信息处理 | 基于注意力多尺度特征融合的频谱感知方法
信号与信息处理 | 基于注意力多尺度特征融合的频谱感知方法
-
信号与信息处理 | 认知无线电频谱感知技术研究综述
信号与信息处理 | 认知无线电频谱感知技术研究综述
-
信号与信息处理 | 基于图检测方法的语音信号检测
信号与信息处理 | 基于图检测方法的语音信号检测
-
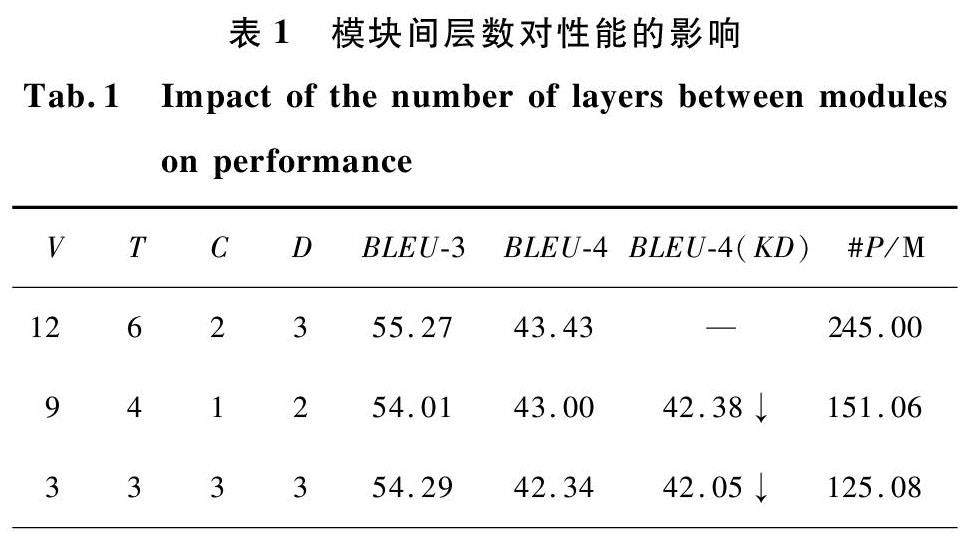
信号与信息处理 | 基于知识蒸馏的视频描述轻量化模型及性能优化
信号与信息处理 | 基于知识蒸馏的视频描述轻量化模型及性能优化
-
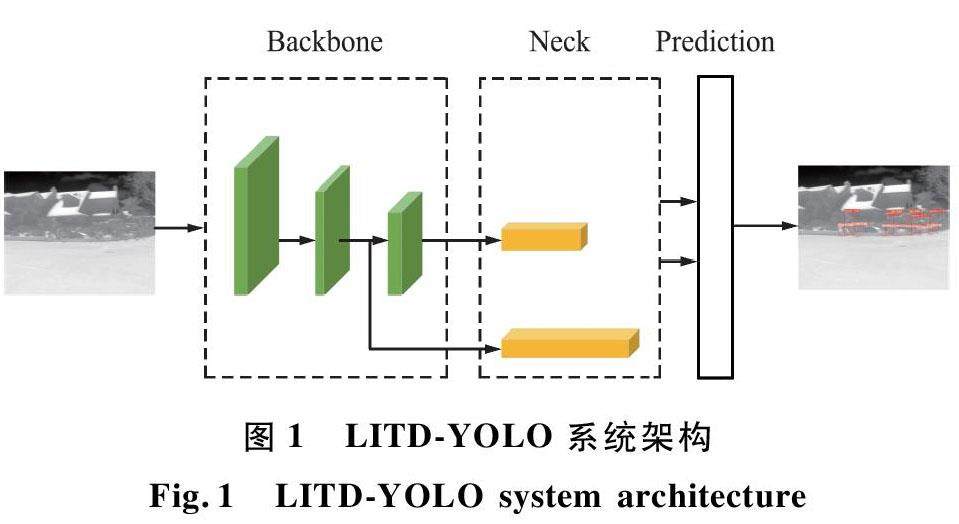
信号与信息处理 | 轻量级红外目标检测算法研究
信号与信息处理 | 轻量级红外目标检测算法研究
-
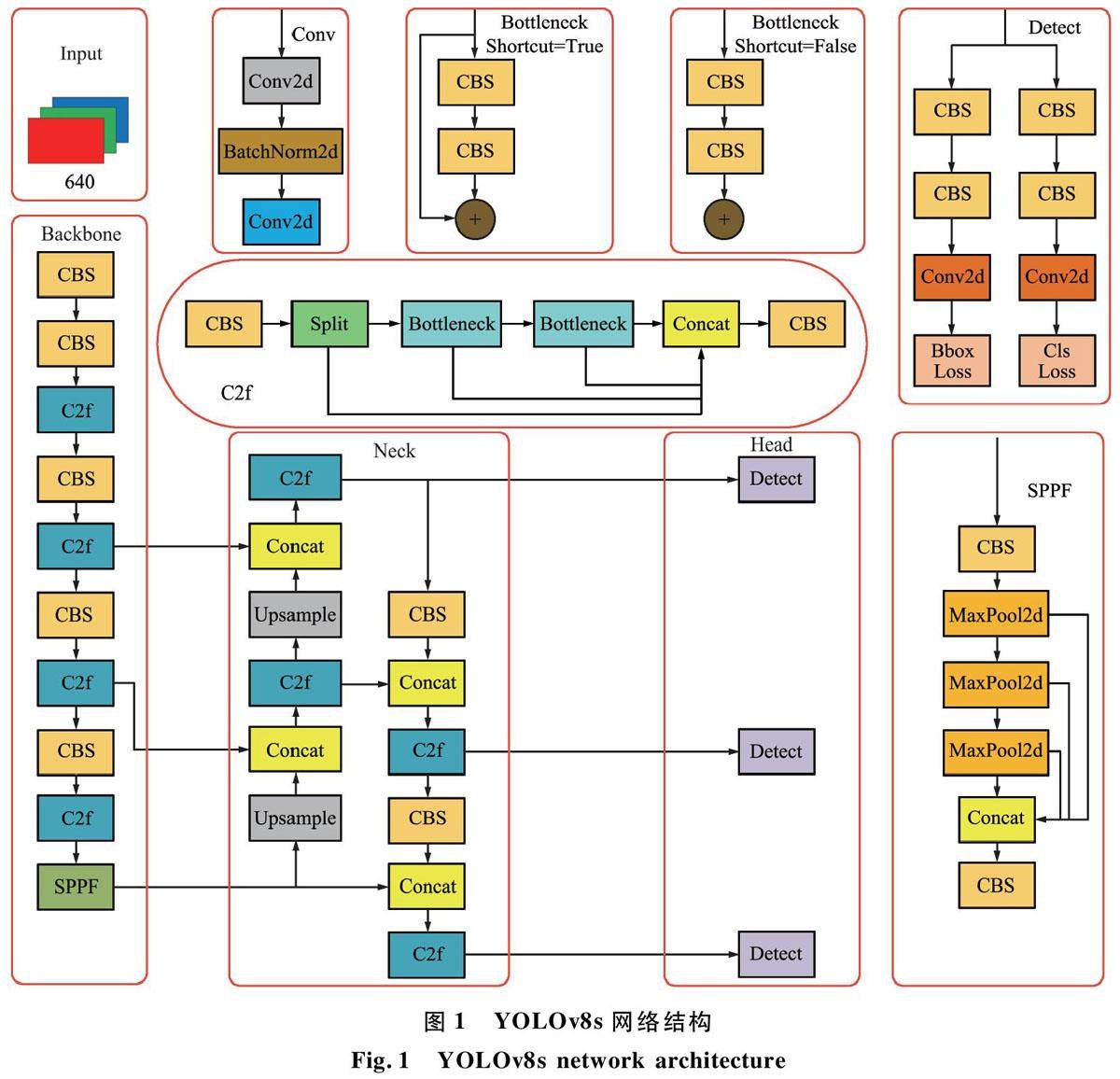
信号与信息处理 | 基于YOLO8s的城市背景烟火检测算法
信号与信息处理 | 基于YOLO8s的城市背景烟火检测算法
-

信号与信息处理 | 基于多头注意力融合的场景文本识别
信号与信息处理 | 基于多头注意力融合的场景文本识别
-

信号与信息处理 | 基于级联注意力和边界预测改进的轻量Segformer语义分割
信号与信息处理 | 基于级联注意力和边界预测改进的轻量Segformer语义分割
-
信号与信息处理 | 小样本深度学习在目标识别分类领域的应用前景研究
信号与信息处理 | 小样本深度学习在目标识别分类领域的应用前景研究
-
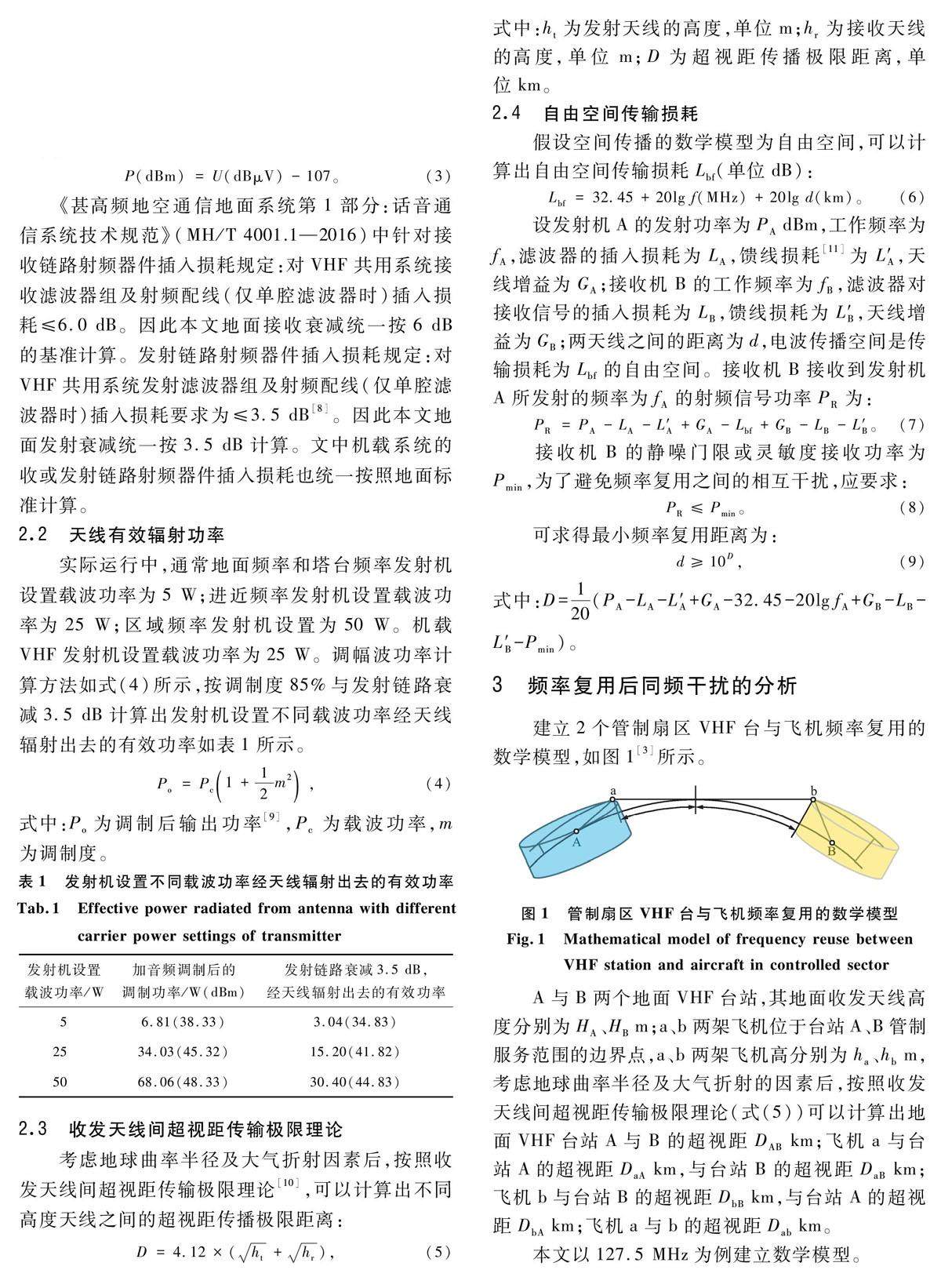
电磁场与微波 | 民用航空地空通信频率复用分析
电磁场与微波 | 民用航空地空通信频率复用分析
-
电磁场与微波 | 基于改进环境编码的无线电环境地图预测方法
电磁场与微波 | 基于改进环境编码的无线电环境地图预测方法
-
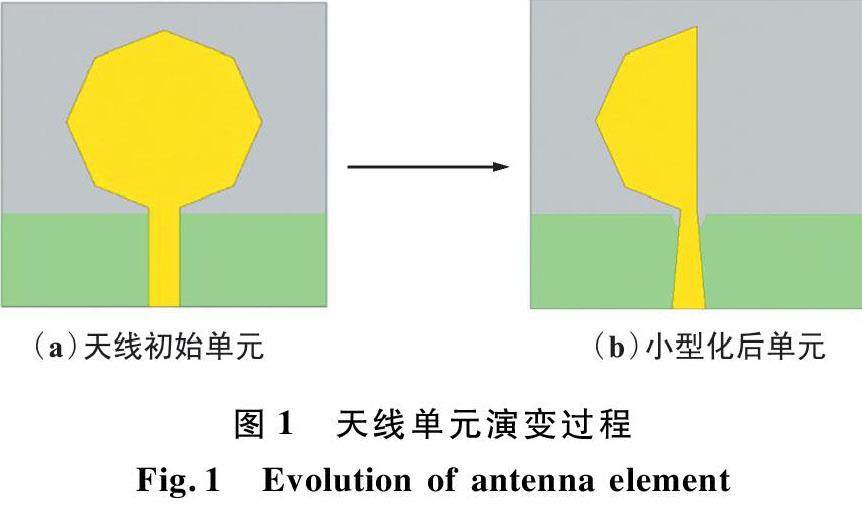
电磁场与微波 | 一种高隔离度陷波UWB MIMO天线设计
电磁场与微波 | 一种高隔离度陷波UWB MIMO天线设计
-
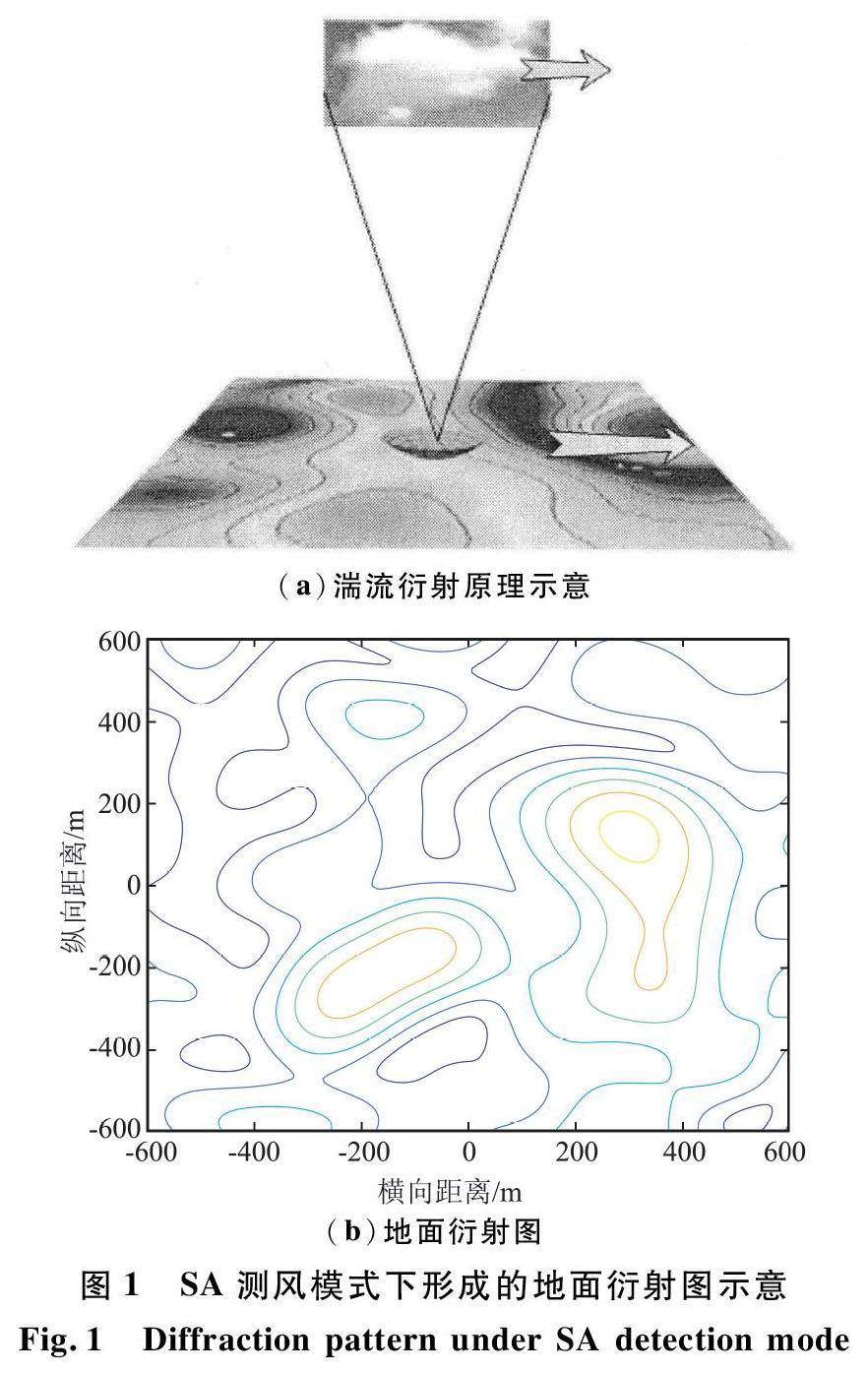
电磁场与微波 | 基于空分天线的雷达大气目标探测技术研究
电磁场与微波 | 基于空分天线的雷达大气目标探测技术研究
-
工程与应用 | 一种改进的群组机器人网络路由算法
工程与应用 | 一种改进的群组机器人网络路由算法
-
工程与应用 | 受古铜币灵感设计的太赫兹多波束调控反射编码超表面
工程与应用 | 受古铜币灵感设计的太赫兹多波束调控反射编码超表面
-
工程与应用 | 基于迭代判决反馈的移动短波信道频域均衡技术
工程与应用 | 基于迭代判决反馈的移动短波信道频域均衡技术
-

工程与应用 | 一种面向多RIS的LMMSE信道估计方法
工程与应用 | 一种面向多RIS的LMMSE信道估计方法
-
工程与应用 | 机器人路径规划中的算法研究综述
工程与应用 | 机器人路径规划中的算法研究综述
-
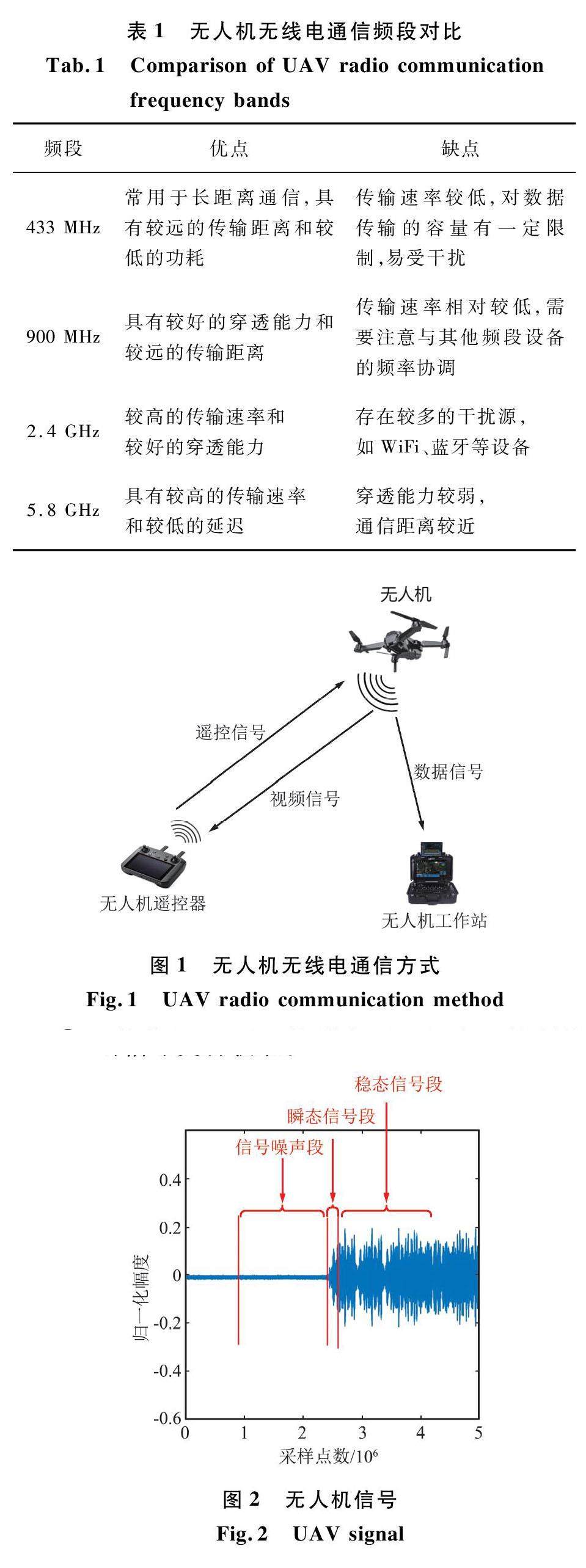
工程与应用 | 无人机射频指纹识别方法综述
工程与应用 | 无人机射频指纹识别方法综述
-
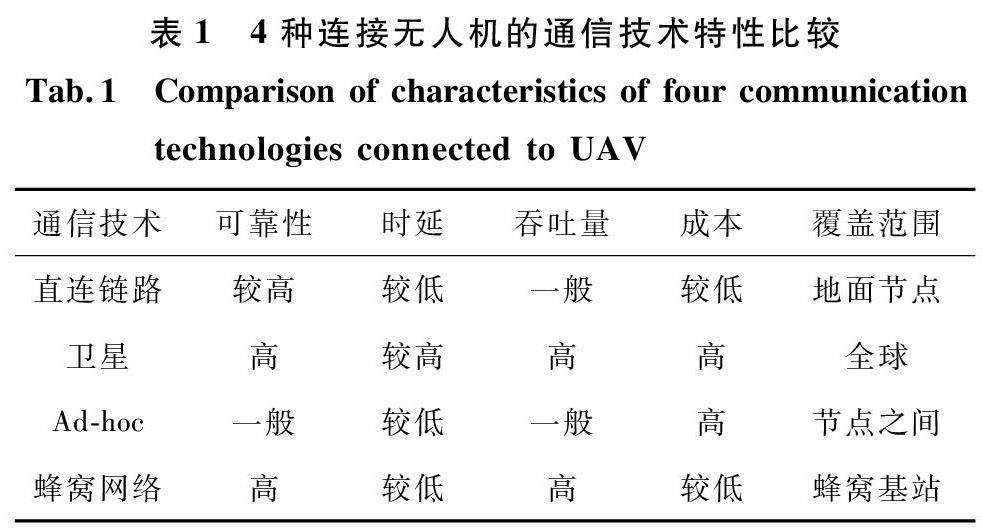
工程与应用 | 无人机连接蜂窝网络的应用与挑战
工程与应用 | 无人机连接蜂窝网络的应用与挑战
-

工程与应用 | 基于同步预测的无线传感网络自适应采样节能策略研究
工程与应用 | 基于同步预测的无线传感网络自适应采样节能策略研究
-
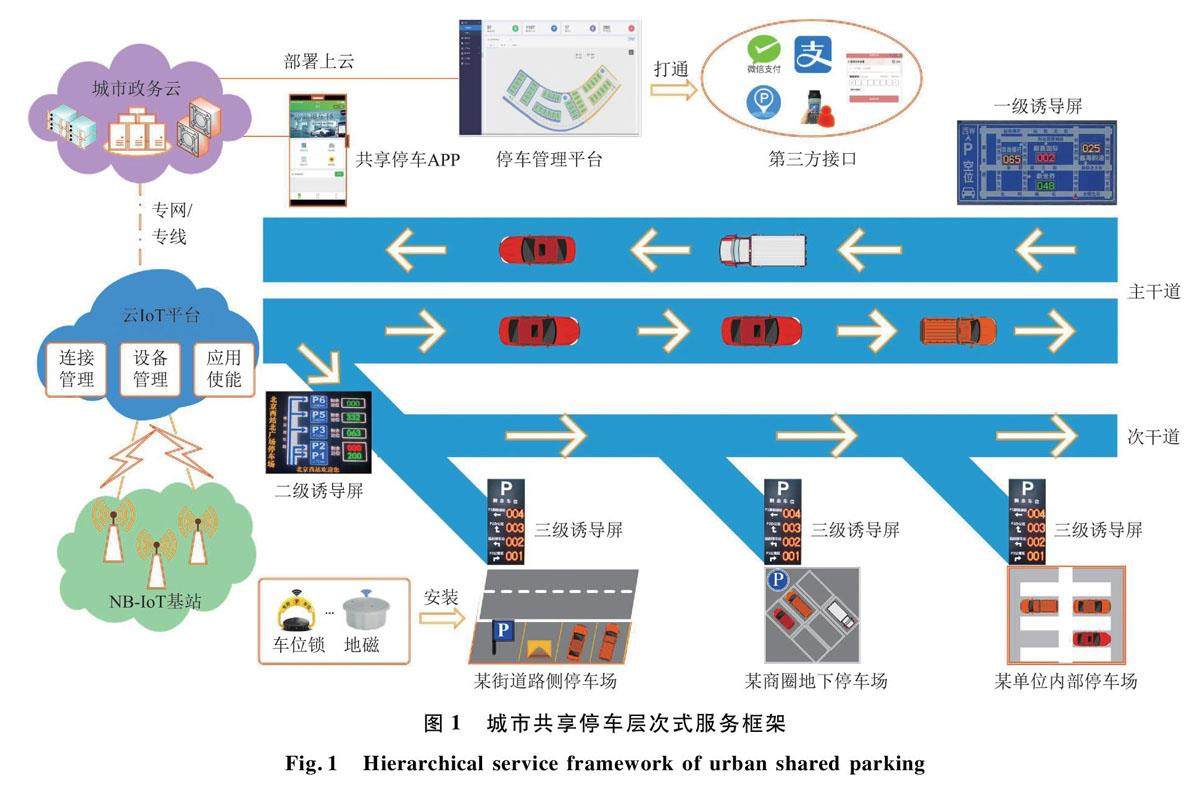
工程与应用 | 基于Harmony OS与NB IoT的城市共享停车系统设计与性能评估
工程与应用 | 基于Harmony OS与NB IoT的城市共享停车系统设计与性能评估
-

工程与应用 | 基于物联网的实时异常用电行为监测系统设计
工程与应用 | 基于物联网的实时异常用电行为监测系统设计
-
工程与应用 | 基于雷视融合YOLOv5变电站行人检测
工程与应用 | 基于雷视融合YOLOv5变电站行人检测





















 登录
登录