
目录
快速导航-
院士观点 | 精准时空感知赋能数字经济发展
院士观点 | 精准时空感知赋能数字经济发展
-
信号与信息处理 | 基于注意力机制与多尺度融合的PCB缺陷检测
信号与信息处理 | 基于注意力机制与多尺度融合的PCB缺陷检测
-
信号与信息处理 | 基于双目视觉的车前行人检测方法研究
信号与信息处理 | 基于双目视觉的车前行人检测方法研究
-
信号与信息处理 | 基于残差神经网络和注意力机制的频谱感知方法
信号与信息处理 | 基于残差神经网络和注意力机制的频谱感知方法
-

信号与信息处理 | 基于用户行为和上下文语义的分层ST LSTM位置预测
信号与信息处理 | 基于用户行为和上下文语义的分层ST LSTM位置预测
-

信号与信息处理 | 反向散射中基于载波索引的混合NOMA方案
信号与信息处理 | 反向散射中基于载波索引的混合NOMA方案
-
信号与信息处理 | 基于UI LSTM模型的短时降水预测研究
信号与信息处理 | 基于UI LSTM模型的短时降水预测研究
-
信号与信息处理 | 基于感知哈希算法的特征融合玻璃瓶缺陷检测
信号与信息处理 | 基于感知哈希算法的特征融合玻璃瓶缺陷检测
-
信号与信息处理 | 基于注意力机制和复数卷积循环网络的汽车雷达干扰抑制
信号与信息处理 | 基于注意力机制和复数卷积循环网络的汽车雷达干扰抑制
-
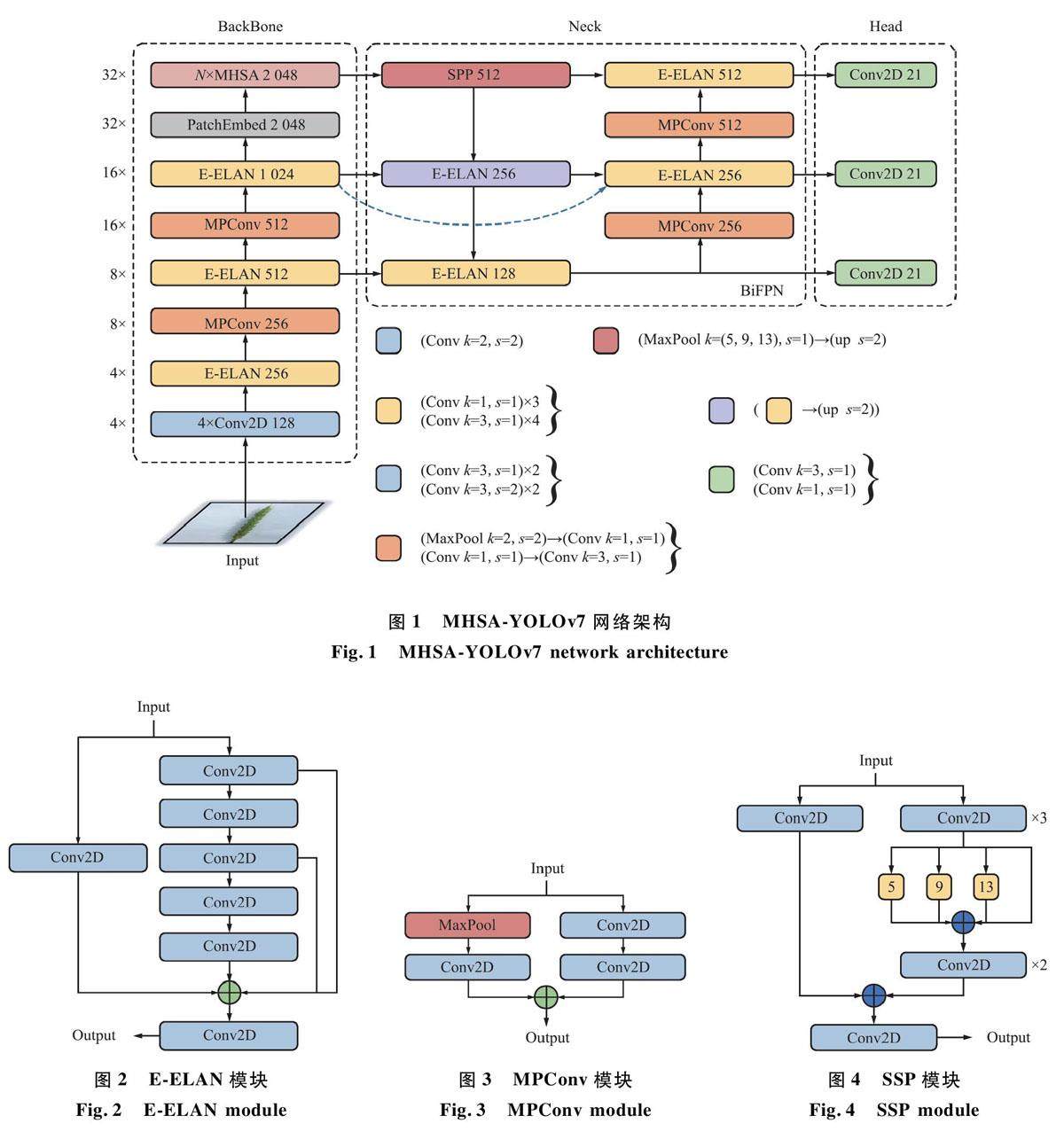
信号与信息处理 | 基于MHSA YOLOv7的小麦赤霉病感染率检测
信号与信息处理 | 基于MHSA YOLOv7的小麦赤霉病感染率检测
-
信号与信息处理 | 基于小波阈值去噪与时频图像检测的信号调制识别技术
信号与信息处理 | 基于小波阈值去噪与时频图像检测的信号调制识别技术
-

信号与信息处理 | 基于注意力和Transformer的阿尔兹海默症分类
信号与信息处理 | 基于注意力和Transformer的阿尔兹海默症分类
-
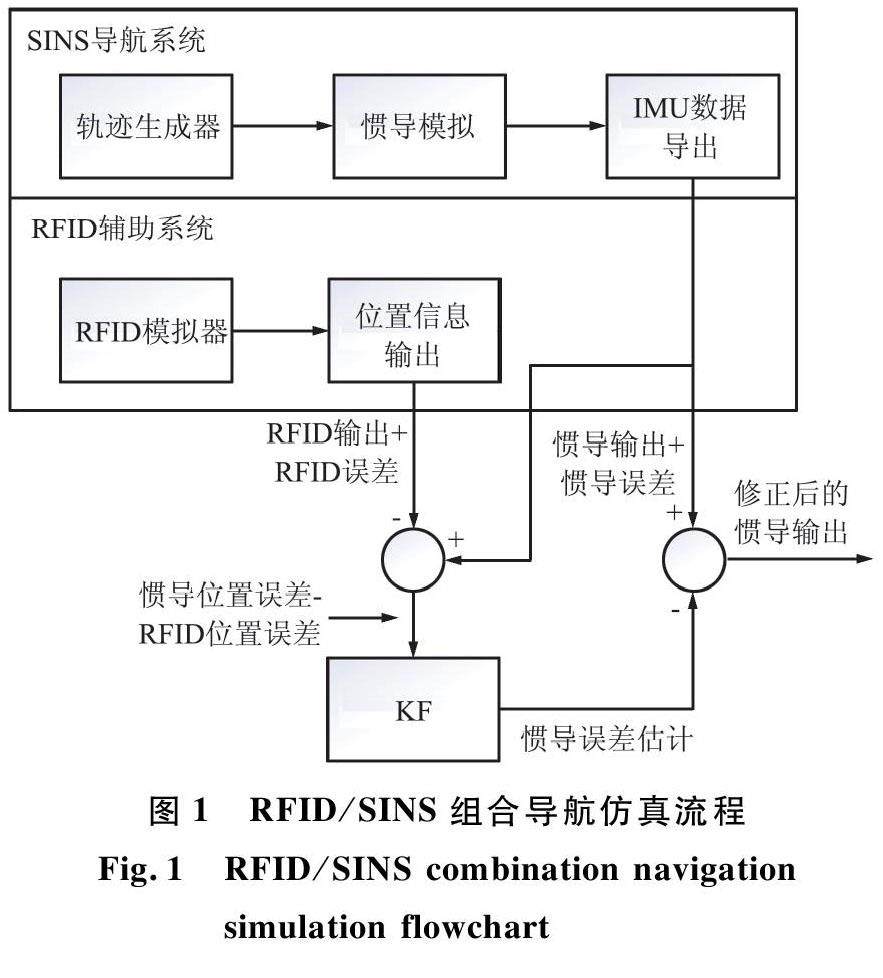
测控遥感与导航定位 | 基于自适应卡尔曼滤波的RFID/SINS组合导航研究
测控遥感与导航定位 | 基于自适应卡尔曼滤波的RFID/SINS组合导航研究
-
测控遥感与导航定位 | 改进蛇优化算法在室内UWB定位的应用
测控遥感与导航定位 | 改进蛇优化算法在室内UWB定位的应用
-
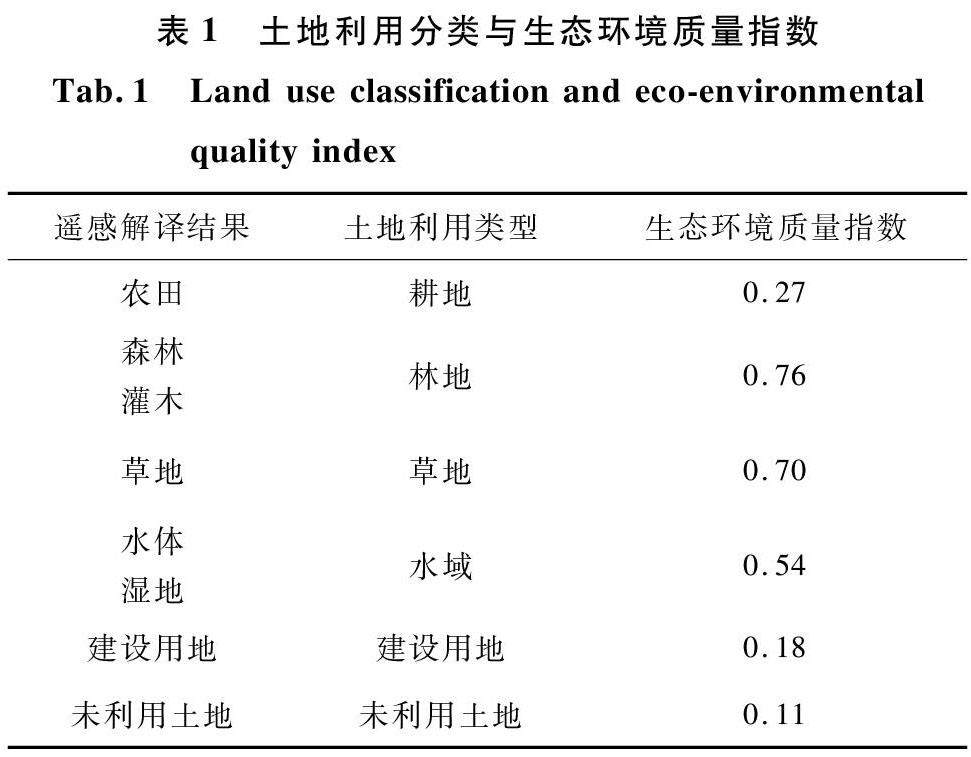
测控遥感与导航定位 | 长春市土地利用时空转型及其生态环境响应
测控遥感与导航定位 | 长春市土地利用时空转型及其生态环境响应
-
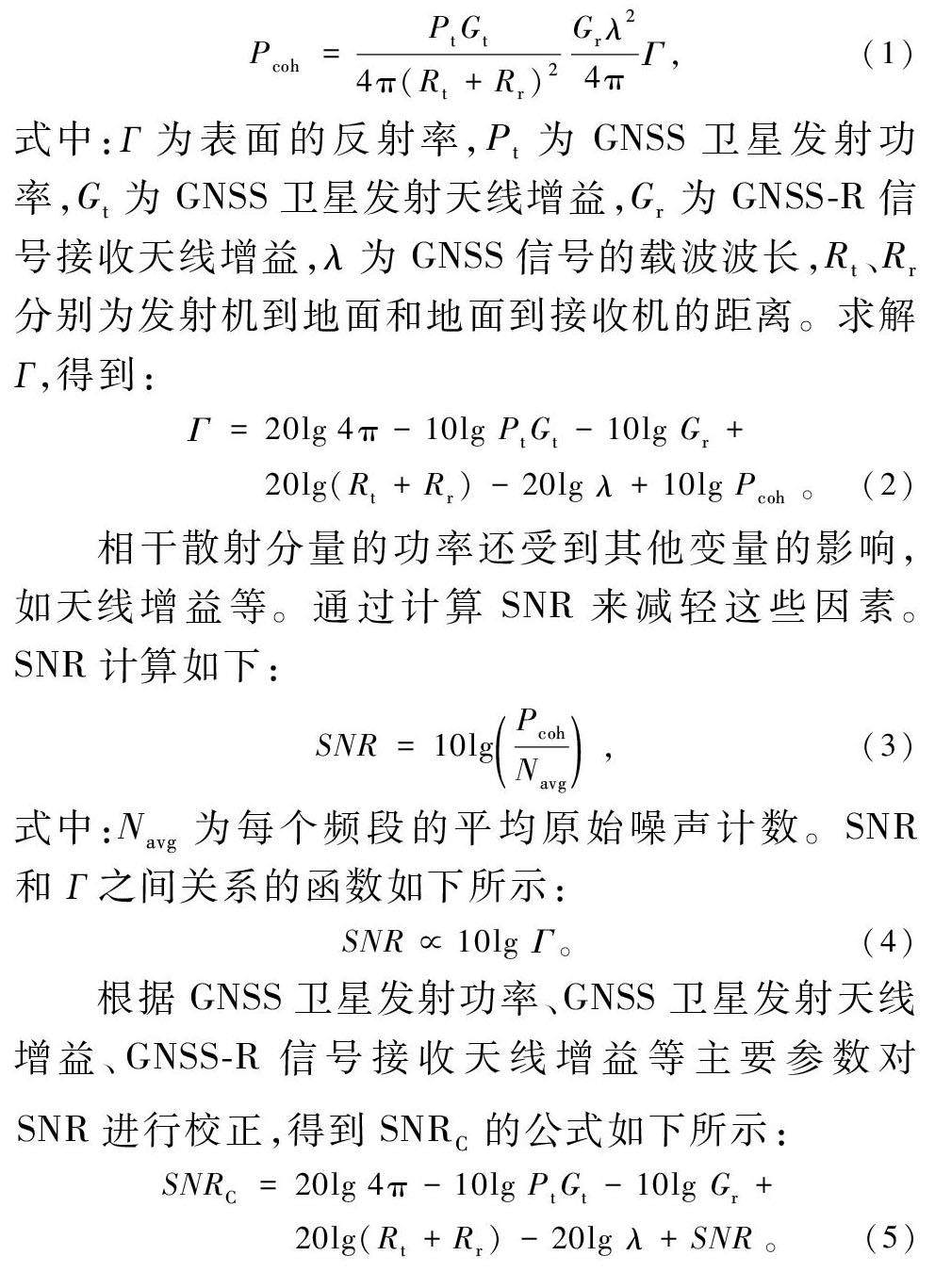
测控遥感与导航定位 | 基于SVM模型的星载GNSS-R内陆水体识别方法研究
测控遥感与导航定位 | 基于SVM模型的星载GNSS-R内陆水体识别方法研究
-
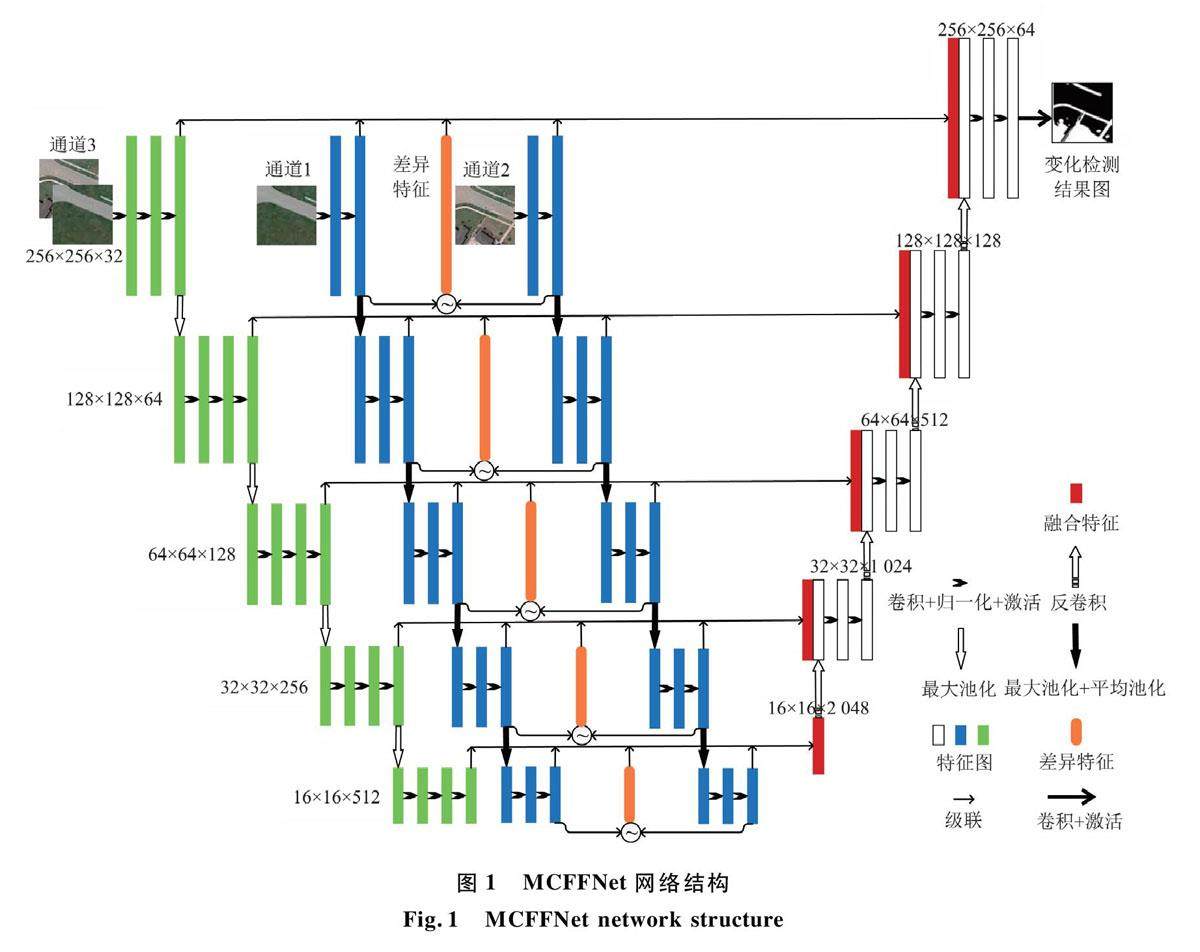
测控遥感与导航定位 | 多通道U型网络遥感影像变化检测
测控遥感与导航定位 | 多通道U型网络遥感影像变化检测
-

电磁场与微波 | 大风扰动对深空探测大天线指向的影响分析
电磁场与微波 | 大风扰动对深空探测大天线指向的影响分析
-
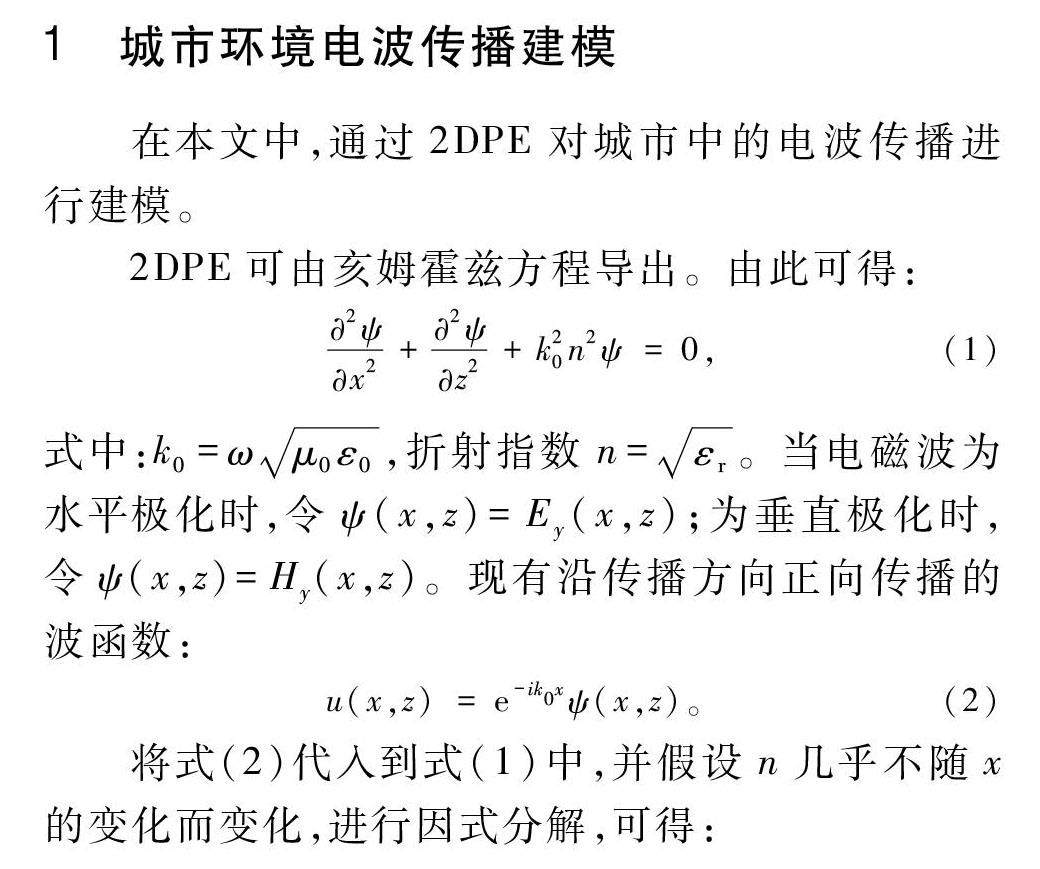
电磁场与微波 | 基于DNN的二维抛物方程电波传播修正模型
电磁场与微波 | 基于DNN的二维抛物方程电波传播修正模型
-

电磁场与微波 | 一种LDLT分解的外辐射源雷达杂波抑制并行处理技术
电磁场与微波 | 一种LDLT分解的外辐射源雷达杂波抑制并行处理技术
-

电磁场与微波 | 基于多面无相位近场数据的电磁干扰源等效建模
电磁场与微波 | 基于多面无相位近场数据的电磁干扰源等效建模
-

电磁场与微波 | 用于5G智能手机的宽带高隔离度MIMO天线
电磁场与微波 | 用于5G智能手机的宽带高隔离度MIMO天线
-
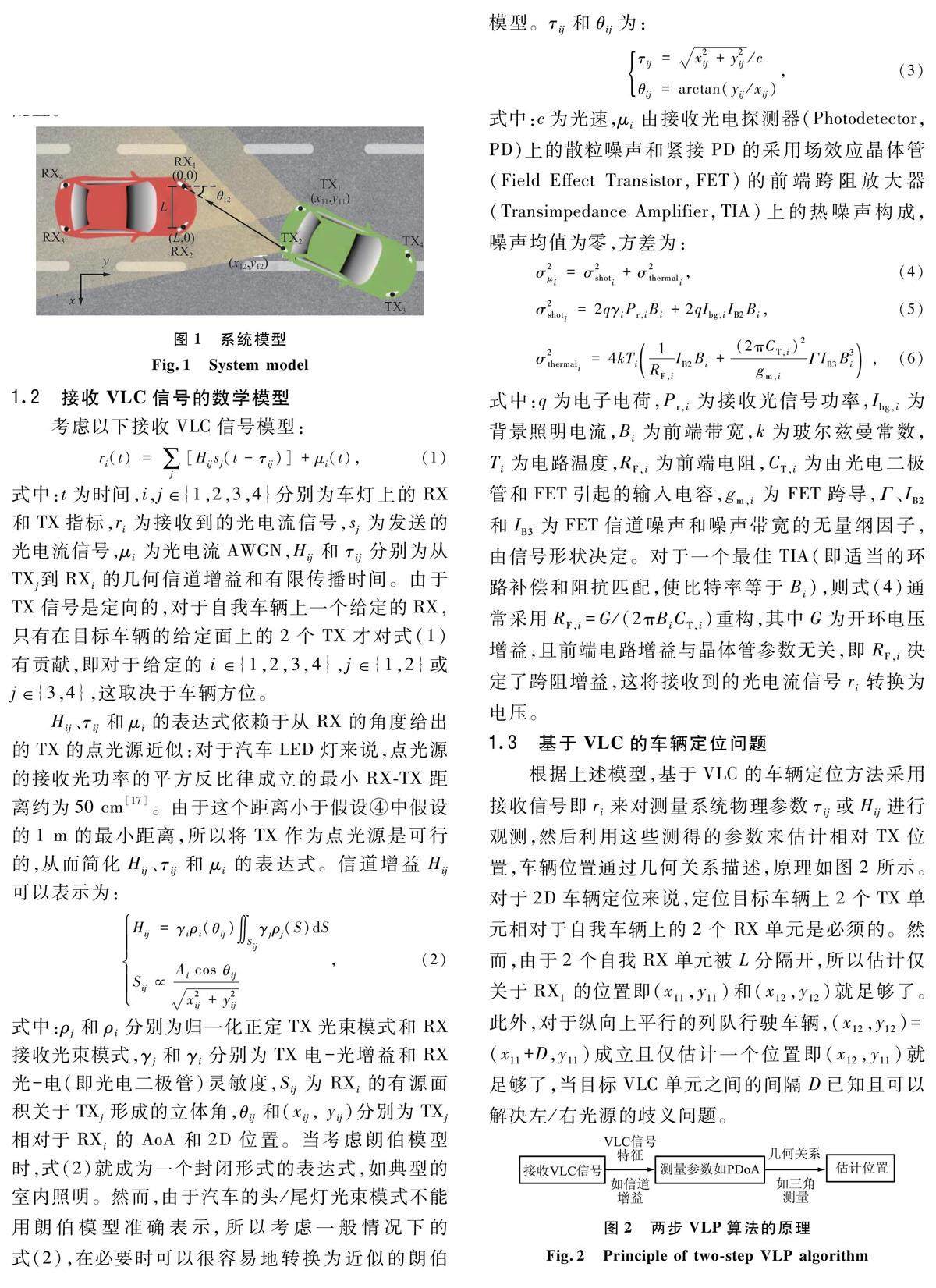
工程与应用 | 基于系统物理参数测量和几何关系的车辆定位
工程与应用 | 基于系统物理参数测量和几何关系的车辆定位
-
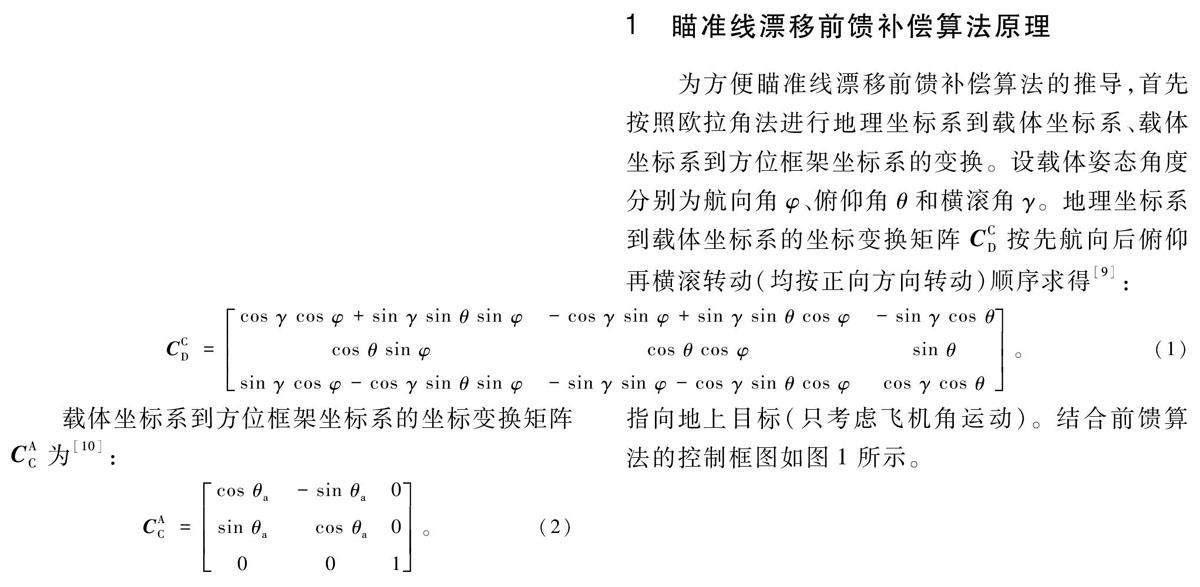
工程与应用 | 光电稳定平台瞄准线漂移前馈补偿算法
工程与应用 | 光电稳定平台瞄准线漂移前馈补偿算法
-
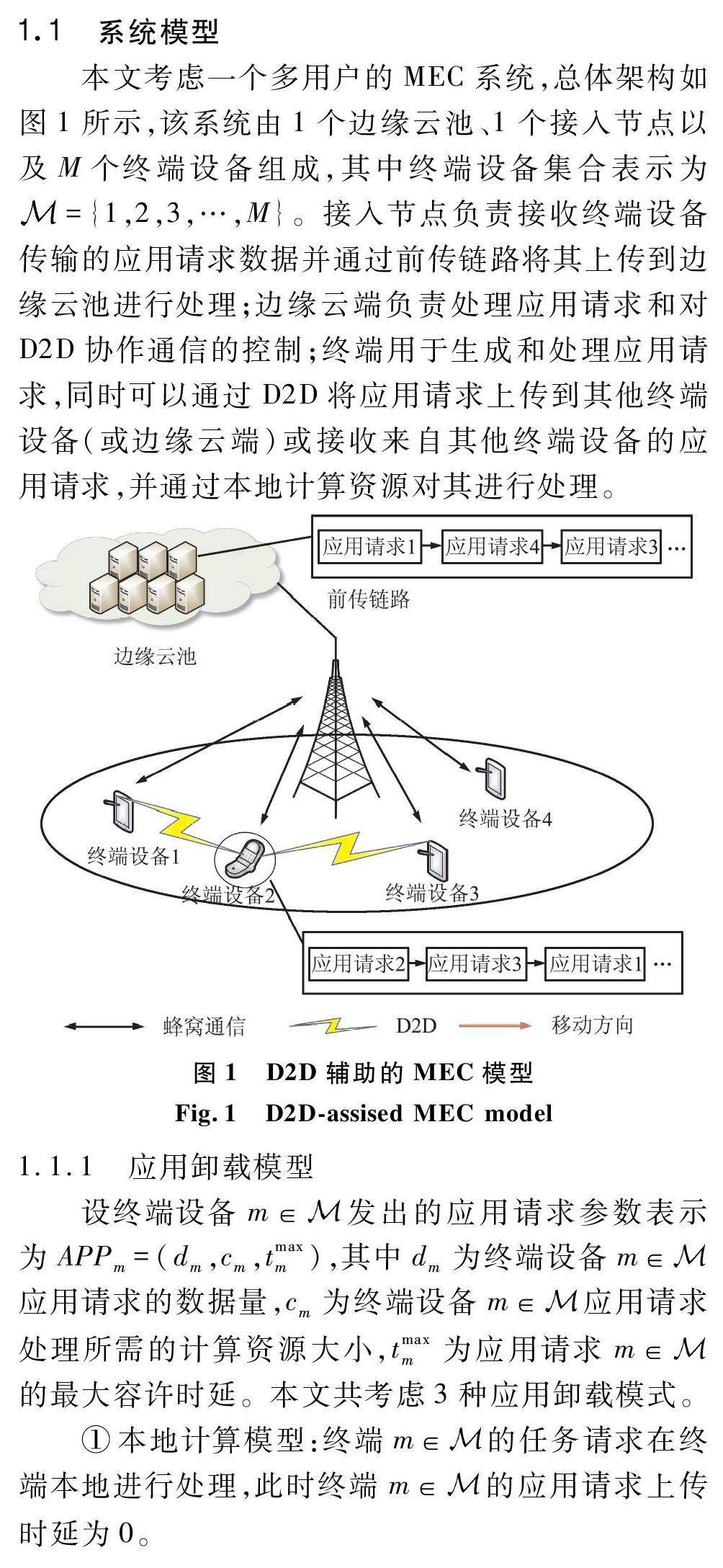
工程与应用 | 面向多应用的绿色卸载与处理方案研究
工程与应用 | 面向多应用的绿色卸载与处理方案研究
-
工程与应用 | 基于遗传算法和蚁群算法的LEACH改进协议
工程与应用 | 基于遗传算法和蚁群算法的LEACH改进协议
-

工程与应用 | 基于多传感器融合的系统自我定位与地图重建
工程与应用 | 基于多传感器融合的系统自我定位与地图重建
-
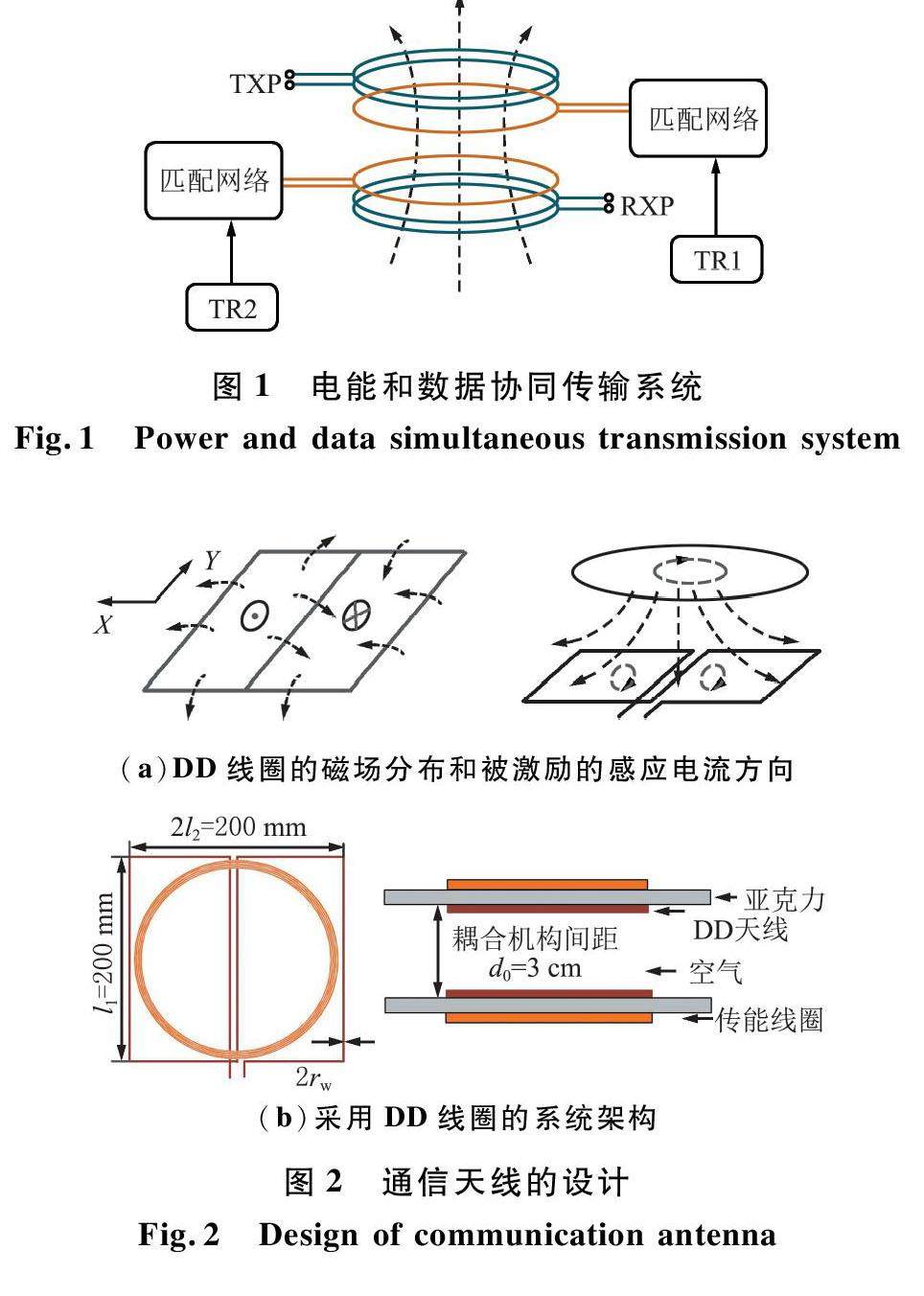
工程与应用 | 面向无线传能的磁耦合通信射频链路解耦设计
工程与应用 | 面向无线传能的磁耦合通信射频链路解耦设计
-
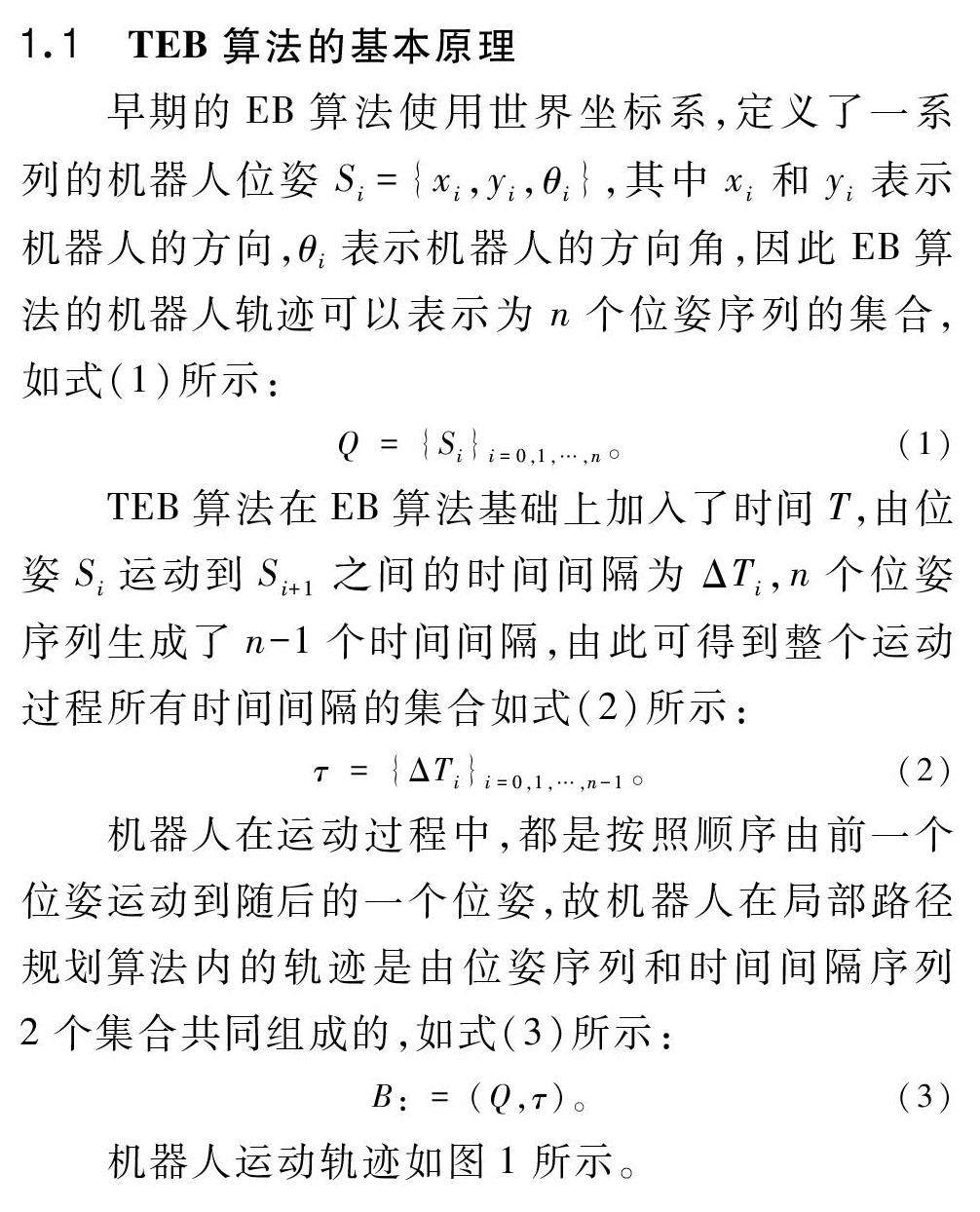
工程与应用 | TEB算法中机器人平稳避障策略研究
工程与应用 | TEB算法中机器人平稳避障策略研究
-
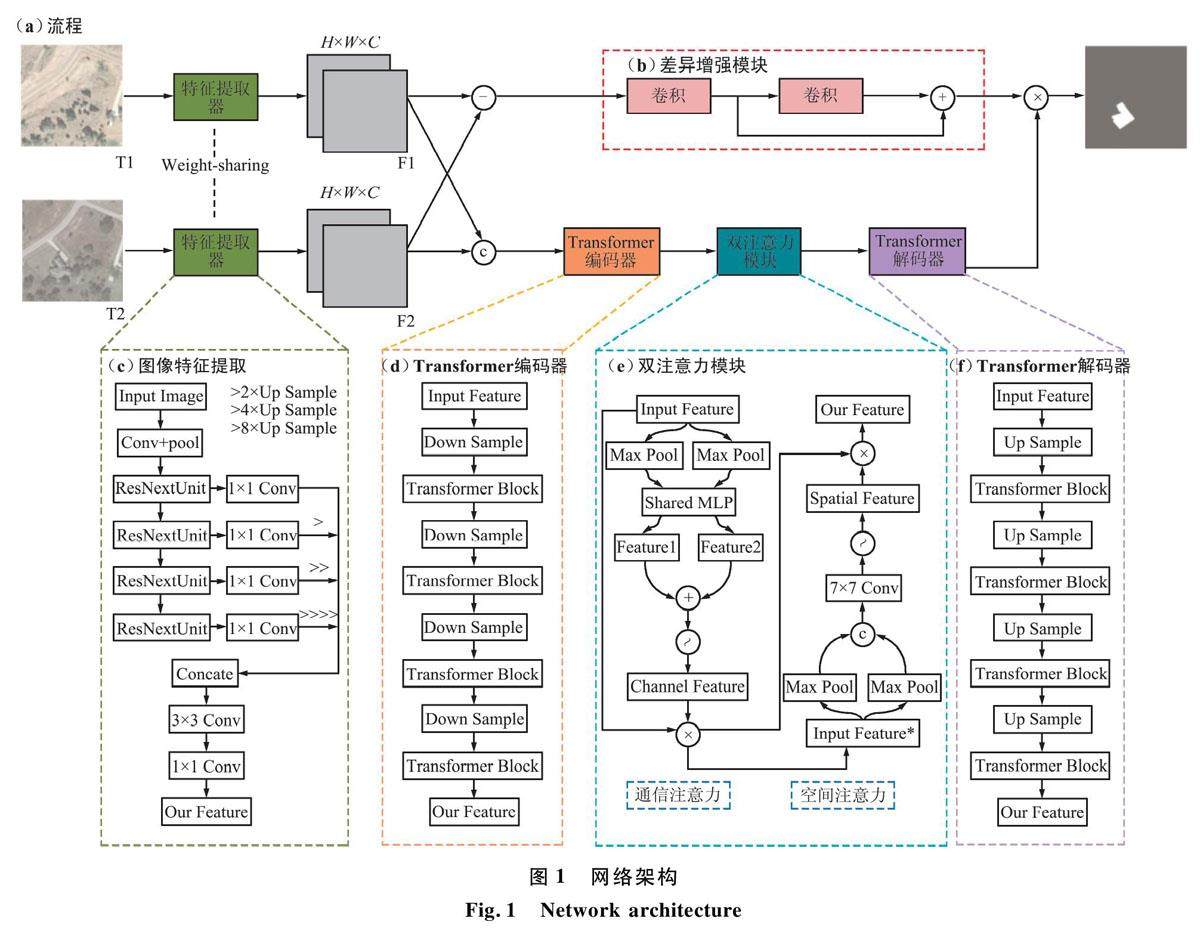
工程与应用 | 基于差异增强和双注意力Transformer的遥感图像变化检测
工程与应用 | 基于差异增强和双注意力Transformer的遥感图像变化检测





















 登录
登录